Overview
Pothole damage costs US drivers $3 billion annually. In order to combat this problem, driverless pothole-filling robots will become reality. In order to prepare for this, our team designed a routing algorithm to decide which blocks in Chicago to visit in order to fill potholes effectively, a machine-learning algorithm to predict the number of potholes that would be formed in a ward of Chicago over a period of time (which can be used to determine the number of robots that would be necessary to counteract more potholes from forming), and a website to visualize the results of the routing algorithm and the pothole count predictor.
In this project, I was responsible for the design and implementation of the routing algorithm. The algorithm is implemented in Python and uses OSMNX to get graphs of Chicago, Geopandas to divide the graph of Chicago into wards using ward boundaries, and the Chicago Data Portal to get active pothole locations. The algorithm divides the graph of wards of Chicago into blocks, assigns potholes to blocks, and then ranks each block based off of the number of pothole reports in the block, the amount of time it would take to fill every pothole in the block, and the distance the block is from the facility a robot is located in. The route is decided using a combination of the Traveling Salesman Problem (TSP), Binary Programming, and the Chinese Postman Problem (CPP).
Scenario
We have a weighted, directed multigraph of a ward in Chicago. The edges of this graph are roads and the vertices are intersections. The ward has potholes as well as robots to fill those potholes. Each robot can travel a certain maximum speed and are assigned to designated facilities in the ward. Ie, each robot is assigned to a vertex in the graph of the ward. The robot can be outside for a certain period of time before traffic becomes an issue, but the robots cannot travel faster than the speed limit on any particular road. Furthermore, it takes time to fill each pothole in the ward (we assume it's a constant). We want the robots to fill the potholes in the ward for as long as it can be outside without disturbing traffic. Furthermore, we want the robot to return to the facility where it came from when it is done filling potholes.
Precomputation
-
Step 1: Make the ward graph strongly connected
By default, the graph of a ward is a directed multigraph, and it is not necessarily strongly connected. This means it's possible for the robot to never be able to return to the facility where it came from.
In order to make the graph of the region strongly connected, we follow these steps:
- Find the set of strongly connected components (SCCs) in the graph
- For each SCC:
- Find the SCC that is nearest to it
- Find the smallest road connecting the two SCCs and make it bidirectional
-
Step 2: Divide the ward into blocks
A block is the smallest geographic area that is encompassed entirely by streets. Thus, the set of blocks can be found by computing the cycle basis of the ward graph without considering the direction of the streets. After this, we determine whether or not a cycle is strongly connected while considering the direction of the edges. If it is, we consider the cycle to be a block. Any edges that were not apart of a strongly connected cycle in the cycle basis will be considered blocks.
-
Step 3: Chinese Postman Problem
If a robot visits a block, we will assume that the robot travels across every single road in the block at least once in order to find potholes that may not have been reported. We will also assume the robot starts and stops at the same spot in the block. This is known as the Chinese Postman Problem. The solution to this problem is to augment the graph of the ward to be Eulerian by adding edges to the graph of the ward. Typically, edges represent single roads, and thus it doesn't make sense to just fabricate new edges. However, edges can also represent a path of connected roads. Thus, we fabricate edges that are equally weighted to the minimum-weight path connecting the two vertices in the edge. The weight of an edge is considered to be its length in meters.
-
Step 4: Find the time it takes to travel the roads
Each robot can travel a certain maximum speed; however, the robot may not be able to travel that fast due to speed limits. To factor the speed limit, we go to each road in the graph of a ward, take the minimum of the speed limit and the speed of the robot, and then divide the length of the road by that speed. This will be the amount of time it takes for the robot to travel across the road. If the robots have different maximum speeds, then this calculation is performed for each unique maximum speed.
-
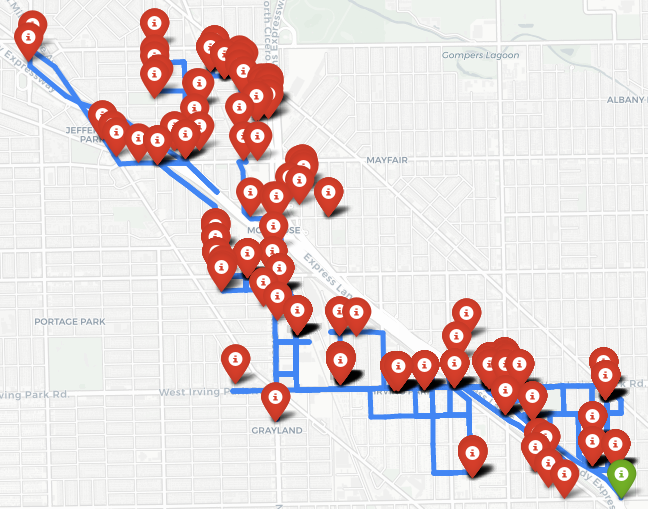
Step 5: Map potholes to blocks
We obtain the set of potholes from the Chicago Data Portal using Pandas. Each pothole has a latitude and longitude in this dataset. We find the vertex that is nearest to this pothole using OSMNX and then find the block that the vertex is contained in. After this, we compute the number of pothole reports in each block and estimate the amount of time it would take to fill all potholes in the block at once. We assume the amount of time it takes to fill a single pothole is a constant (which we set to 15 minutes by default). We also consider the priority of filling potholes in the block to be the number of potholes assigned to that block.
Routing Algorithm
-
Step 1: Rank blocks
Each block has a priority of being visited; however, we cannot simply visit the highest-priority blocks first. This is because high-priority blocks may be distant from the robot, which would end up wasting a lot of time if we visit them in that order. It's more efficient to visit some lower-priority blocks on the way to higher-priority blocks. Thus, we rank the blocks as a function of priority, the distance the center of the block is from the starting point of the robot, and the amount of time it would take to travel a block. The amount of time to travel a block is the sum of the time it takes to travel every road in the block and the time it takes to fill every pothole in the block.
The rank is computed as follows:
$$ \begin{equation*} \text{rank}(priority, dist, TTT) = \begin{cases} \frac{priority}{\sqrt{TTT}} & dist \leq 500\text{m} \\ \frac{priority}{\sqrt{TTT*\frac{dist}{500}}} & dist > 500\text{m}\\ \end{cases} \end{equation*} $$
-
Step 2: Select blocks
Each block now has a rank. We want to maximize the total rank of blocks selected under the constraint the robot is not outside for too long. This optimization problem can be phrased in terms of a Binary Integer Program, which we implemented using ConvexPY (CVXPY).
The optimization problem is as follows:
- \(X\) is a vector of bits that represents whether or not a block has been selected
- \(R\) is a vector of positive real numbers that represent the rank of a block
- \(TTT\) is a vector of positive real numbers that represent the amount of time it takes to travel across a block
- \(MaxTTT\) is the maximum amount of time the robot can be outside
$$ \text{Maximize}\: X*R^T \:\text{such that} $$ $$ X*TTT^T \leq MaxTTT $$
-
Step 3: Order blocks
After we select the blocks, we must decide the order with which to visit the blocks. First, imagine that we fabricate roads between the blocks. The roads connect the center of each block to the centers of every other block. The length of this road is the Euclidean distance between the centers of the two blocks. We want to find the subset of these fabricated roads to travel across in order to visit every block at least once. This is equivalent to the Traveling Salesman Problem (TSP). To do this, we used a genetic algorithm from a TSP package in Python. Note, we do not actually fabricate those roads, we just compute the distance between the centers of two blocks whenever they get selected by the genetic algorithm. This prevents a substantial memory overhead.
-
Step 4: Connect blocks
Now that we have the order with which to travel the blocks, we find the path that takes the least amount of time for the robot to travel (considering speed limits). Initially, the robot starts in a facility. Using OSMNX, we find the vertex that is nearest to the facility in the graph of the next block the robot will travel to. We then use Dijkstra's Shortest Path Algorithm to find the minimum-weight path connecting the two vertices. We use travel time as the weight instead of distance. We do this for each block until the last block is connected to the block where the robot facility is located.
-
Step 5: Remove blocks
At this point, we have a route for a single robot to take. This route contains a set of blocks with potholes to fill. We do not want multiple robots visiting the same block, so we remove the set of blocks that this robot will visit from the pool of all blocks. This will guarantee that no two robots attempt to fill potholes in the same block.